
Osoba idąca z plecakiem wyposażonym w odbiornik GPS, jednostkę inercyjną oraz LIDAR
(skaner laserowy) jest w stanie w ciągu kilkudziesięciu minut pomierzyć duży obszar.
Pozycja osoby jest wyznaczana przez odbiornik GNSS, którego pomiar jest korygowany
poprawkami z bazowych stacji RTCM.
Poprawki są odbierane przez modem GSM. Nasze rozwiązanie oparte jest na sprzętowych poprawkach
RTK 2.0.
Sam pomiar współrzędnych nie wystarcza. Do określenia kierunku wiązki lasera
istotna jest również orientacja skanera względem podłoża. Do uzyskania tych danych
wykorzystujemy jednostkę inercyjną (IMU), składającą się z akcelerometrów i żyroskopów.
Pomiar orientacji wykonywany jest z większą częstotliwością niż pomiar GNSS.
Dzięki zastosowaniu algorytmu SLAM możemy znacznie dokładniej określić pozycję
i orientację skanera.
LIDAR mierzy odległość do powierzchni terenu oraz innych obiektów znajdujących się w zasięgu
wiązki laserowej. Znając pozycję oraz orientację, jesteśmy w stanie stworzyć dokładną mapę
wysokościową terenu. Co więcej, punkty pomiarowe tworzą gęstą siatkę pokrywającą całą powierzchnię
obiektu, co pozwala całkowicie zrezygnować z wykonywania pomiarów metodą tradycyjną.
Plecak jest wyposażony w kamery wykonujące zdjęcia terenu podczas pomiaru.
Zdjęcia służą zarówno do podglądu rzeczywistego obrazu, jak i do pokolorowania chmury punktów.
Zarejestrowane dane z czujników zapisywane są na przenośnym nośniku, z którego mogą zostać
zaimportowane bezpośrednio do Neocart. Po wstępnej obróbce w Neocart użytkownik otrzymuje
chmurę punktów, która stanowi podstawę do dalszych prac nad mapą do celów projektowych.
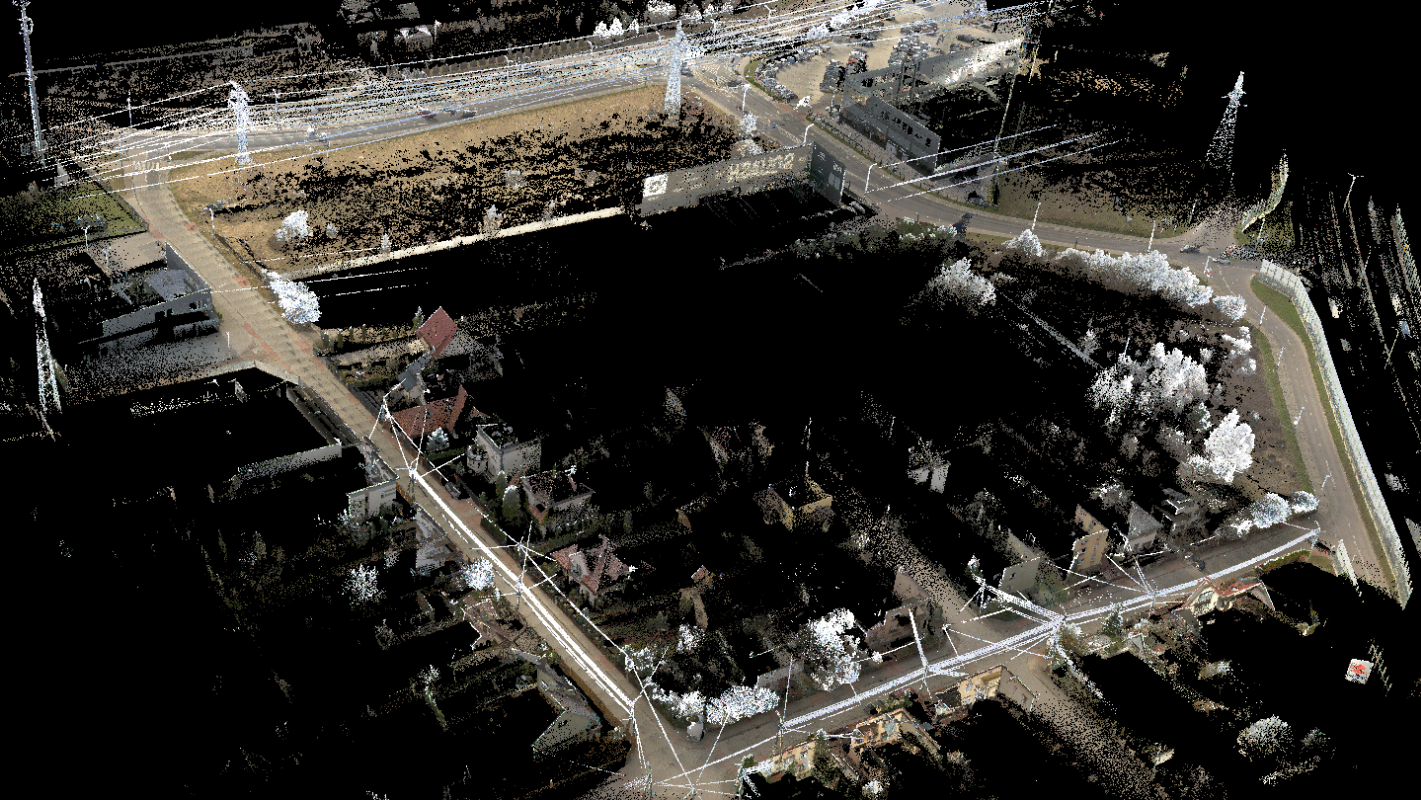
Poniżej znajduje się widok trójwymiarowej chmury punktów uzyskanej dzięki naszemu rejestratorowi laserowemu BP-32: Przykładowa chmura punktów .